 目标检测
目标检测
2019 目标检测(object detection)指南
16fendouai 发布于 2019-07-25
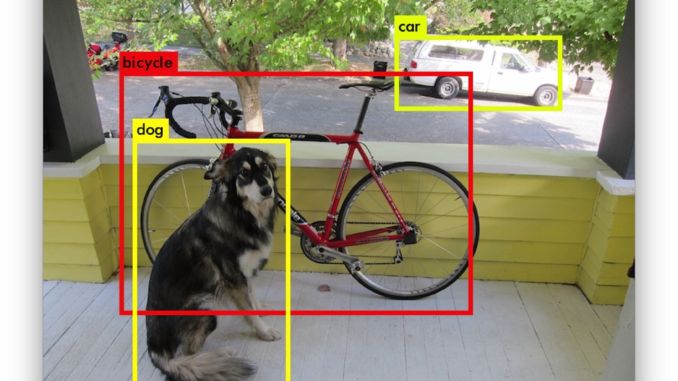
你好,这里有一份2019年目标检测指南 译者|Arno 来源|medium 目标检测(Object detection)是一种计算机视觉技术,旨在检测汽车、建筑物和人类等目标。这些目标通常可以通过图像或视频来识别。 目标检测在视频监控、自动驾驶汽车、人体跟踪等领域得到了广泛的应用...
阅读(4568)评论(0)赞 (2)
fendouai 发布于 2019-07-25
你好,这里有一份2019年目标检测指南 译者|Arno 来源|medium 目标检测(Object detection)是一种计算机视觉技术,旨在检测汽车、建筑物和人类等目标。这些目标通常可以通过图像或视频来识别。 目标检测在视频监控、自动驾驶汽车、人体跟踪等领域得到了广泛的应用...
阅读(4568)评论(0)赞 (2)
fendouai 发布于 2019-07-08
~~时装业是人工智能领域很有前景的领域。研究人员可以开发具有一定实用价值的应用。我已经在这里展示了我对这个领域的兴趣,在那里我开发了一个来自Zalando在线商店的推荐和标记服装的解决方案。~~ 在这篇文章中,我们会开发一个提取连衣裙的应用。它输入原始的图像(从网络上下载或用智能...
阅读(2853)评论(0)赞 (0)