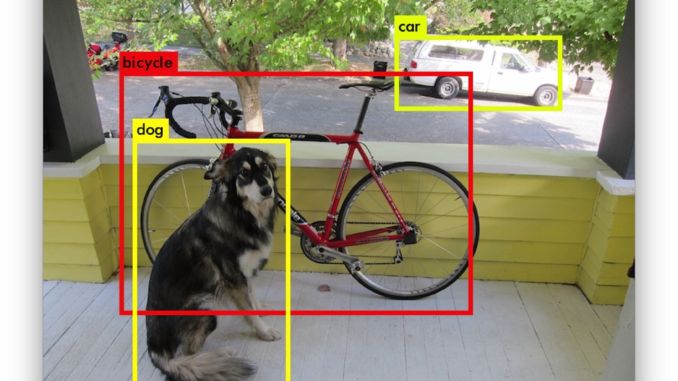
 目标检测
目标检测
扩展Detectron2的默认值
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 扩展Detectron2的默认值 研究是以新的方式做事。这给如何在代码中创建抽象带来了压力, 对于任何规模较大的研究工程项目而言,这都是一个挑战: 一方面,它需要具有非常精简的抽象,以允许以新方式进行所有...
阅读(4307)评论(0)赞 (2)
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 扩展Detectron2的默认值 研究是以新的方式做事。这给如何在代码中创建抽象带来了压力, 对于任何规模较大的研究工程项目而言,这都是一个挑战: 一方面,它需要具有非常精简的抽象,以允许以新方式进行所有...
阅读(4307)评论(0)赞 (2)
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 安装 我们的Colab Notebook(https://colab.research.google.com/drive/16jcaJoc6bCFAQ96jDe2HwtXj7BMD_-m5) 具有逐步指导...
阅读(9842)评论(0)赞 (5)
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 使用配置 Detectron2的配置系统使用yaml和yacs(https://github.com/rbgirshick/yacs)。 除了访问和更新配置的基本操作外,我们还提供以下额外功能: 配置中可...
阅读(6153)评论(0)赞 (0)
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 使用自定义数据加载器 现有Dataloader的工作方式 Detectron2包含一个内置的数据加载管道。如果你需要编写自定义代码,最好了解它的工作原理。 Detectron2提供了两个函数 build_...
阅读(4958)评论(0)赞 (1)
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 使用模型 detectron2中的模型(及其子模型)由函数,例如build_model,build_backbone,build_roi_heads构成: from detectron2.modeling...
阅读(9156)评论(0)赞 (1)
fendouai 发布于 2020-03-04
作者|facebookresearch 编译|Flin 来源|Github 编写模型 如果你尝试做一些全新的事情,你可能希望在detectron2中完全从头开始实现一个模型。但是,在许多情况下,你可能对修改或扩展现有模型的某些组件感兴趣.因此,我们还提供了一种注册机制,可让你覆盖...
阅读(5027)评论(0)赞 (0)
fendouai 发布于 2020-03-04
Detectron2专栏开篇 专栏介绍 Detectron是构建在Caffe2和Python之上,实现了10多篇计算机视觉最新的成果。Facebook AI研究院又开源了Detectron的升级版,也就是接下来我们要介绍的:Detectron2。 Detectron2 是 Fac...
阅读(15898)评论(1)赞 (2)
fendouai 发布于 2020-03-04
mmdetection 作者|open-mmlab 编译|Flin 来源|Github 基准测试 和 Model Zoo 环境 硬件 8 个 NVIDIA Tesla V100 GPUs Intel Xeon 4114 CPU @ 2.20GHz 软件环境 Python 3.6 ...
阅读(7903)评论(0)赞 (0)
fendouai 发布于 2020-03-04
mmdetection 作者|open-mmlab 编译|Flin 来源|Github 更新日志 v1.1.0 (24/2/2020) 强调 – 数据集评估使用统一的api重写,评估hook和测试脚本均使用该API。 – 支持新方法:CARAFE。(htt...
阅读(5898)评论(0)赞 (0)
fendouai 发布于 2020-03-04
mmdetection 作者|open-mmlab 编译|Flin 来源|Github 技术细节 在本节中,我们将介绍训练检测器的主要单元:数据管道,模型和迭代管道。 数据管道 按照规定, 我们使用Dataset和DataLoader用于多个处理的数据加载。Dataset返回对应...
阅读(5041)评论(0)赞 (0)
fendouai 发布于 2020-03-04
MMDetection专栏开篇 引言 MMDetection是一款优秀的基于PyTorch的深度学习目标检测工具箱,由香港中文大学(CUHK)多媒体实验室(mmlab)开发。基本上支持所有当前SOTA二阶段的目标检测算法,比如faster rcnn,mask rcnn,r-fcn...
阅读(11433)评论(0)赞 (2)
fendouai 发布于 2020-03-04
mmdetection 作者|open-mmlab 编译|Flin 来源|Github 入门 本页提供有关MMDetection用法的基本教程。 有关安装说明,请参阅上一篇的安装文档 。 预训练模型的推论 我们提供测试脚本来评估整个数据集(COCO,PASCAL VOC等)以及一...
阅读(13861)评论(0)赞 (3)
fendouai 发布于 2019-08-26
使用SlimYOLOv3框架实现实时目标检测 译者|Arno 来源|Analytics Vidhya 概览 实时目标检测正在风靡计算机视觉行业 以下是SlimYOLOv3的介绍,这是最新的实时目标检测框架 我们会介绍SlimYOLOv3架构,包括它如何检测目标 介绍 人类可以在几...
阅读(3955)评论(0)赞 (0)
fendouai 发布于 2019-07-08
~~时装业是人工智能领域很有前景的领域。研究人员可以开发具有一定实用价值的应用。我已经在这里展示了我对这个领域的兴趣,在那里我开发了一个来自Zalando在线商店的推荐和标记服装的解决方案。~~ 在这篇文章中,我们会开发一个提取连衣裙的应用。它输入原始的图像(从网络上下载或用智能...
阅读(2853)评论(0)赞 (0)
fendouai 发布于 2018-12-11

目标检测论文从 2014-2018 模型表现表格 Detector VOC07 (mAP@IoU=0.5) VOC12 (mAP@IoU=0.5) COCO (mAP) Published In R-CNN 58.5 – – CVPR’14 O...
阅读(3509)评论(0)赞 (1)